




Pergala pîvandina helwestê




Taybetmendiyên Hilberê
MS-100A0 li ser bingeha teknolojiya mîkro-mekanîkî (MEMS) helwestek sê-pile-azadî ye.
Pergala pîvandinê, gyroskopa MEMS-a-performansa bilind a çêkirî û leza MEMS-ê, bi navgîniya algorîtmaya parzûnê ve di wextê rast de goşeya pijandinê, goşeya gerok û goşeya sernavê ya hilgirê dihesibîne.di heman demê de vebijarkî bi magnetometre ve tête hev kirin da ku bigihîje vedîtina bakur ya rast-bilind, û leza goşeyê ya 3-texn û leza 3-texne ji bo kontrolkirina tevgerê tê bikar anîn.
Taybetmendiya hilberê
- Ji rastbûna helwesta 0,1° çêtir
- Rêjeya pîvandina helwestê ±90°
- Rêjeya germahiya xebitandinê: -40~65℃
- Jîngeha vibrasyonê: 10~2000Hz, 6g (RMS)
- Cûreyên navberê yên dewlemend, RS232, RS422, CAN û navgînên standard ên din piştgirî bikin
- Sêwirana morkirina avê
Taybetmendiyên Elektrîkê
- Dabînkirina hêzê: 5V (typ.), ketina voltaja fireh a xwerû 12~36V
- Hêza binavkirî: 0.5W (herî zêde)
- Ripple: 100mV (pişk-to-lût)
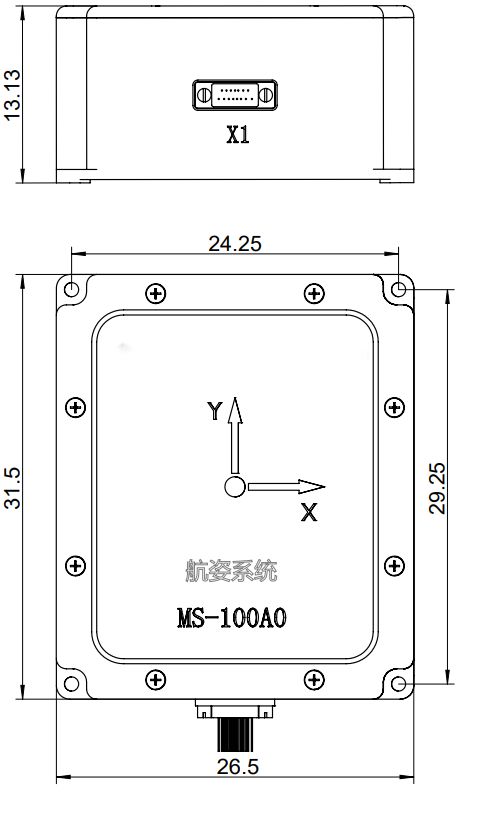
Mezinahiyên Mekanîkî
Nîşaneyên teknîkî
| Parametreyên Gyro | ||||
| Parametre |
Mercên Testê | Nirxa tîpîk |
Nirxa herî zêde | Yekbûn |
| Rêjeya pîvana dînamîk |
|
| 450 | º/s |
| Sifir îstîqrara bias | Varîsansa Allan, teşe Z | 0.8 |
| º/h |
| Guhertoya Allan, X-xebat û Y-tevger | 1.6 |
| º/h | |
| 10s navînî, X, Y ax (-40℃~+80℃, germahiya domdar) | 6 |
| º/h | |
| 1s navîn, X, Y ekse (-40℃~+80℃, germahiya domdar) | 9 |
| º/h | |
| Zero offset | Rêzeya sifirê | ±0.2 |
| º/s |
| Guhertina sifir bias li ser germahiya tevahî | ±0.06 |
| º/s | |
| Dubarebûna destpêk-destpêk | 0.006 |
| º/s | |
| Dubarekirina destpêk a roj bi roj | 0.009 |
| º/s | |
| Bandora Leza Hêzê li ser Zero Bias | 0.002 |
| º/s | |
| Bandora vibrasyonê li ser sifirê, guhertina berî û piştî vibrasyonê | 0.002 |
| º/s | |
| Bandora vibrasyonê li ser sifirê, guherîna berî vibrasyonê | 0.002 |
| º/s | |
| Scale Factor | Rastbûna faktora pîvanê, teşeya Z | 0.3 |
| % |
| Rastiya faktora pîvanê, X, Y eksê | 0.6 |
| % | |
| Scale Factor nonlinearity, Z eksê | 0.01 |
| %FS | |
| Scale Factor nonlinearity, X, Y eksê | 0.02 |
| %FS | |
| Angle rêveçûna random |
| 0.001 |
| °/√hr |
|
Density deng |
| 0.001 |
| °/s/√hr |
| Resolution |
| 3,052×10−7 |
| º/s/LSB |
| Bandwidth |
| 200 |
| Hz |
| Parametreyên Accelerometer | ||||
| Parametre |
Şertên testê |
Nirxa tîpîk | Nirxa herî zêde | Yekbûn |
| Rêjeya pîvana dînamîk |
| 16 |
| g |
| Sifir îstîqrara bias | Allan variance | 0.03 |
| mg |
| Navînî 10s (-40℃~+80℃, germahiya domdar) | 0.2 |
| mg | |
| 1s navîn (-40℃~+80℃, germahiya domdar) | 0..3 |
| mg | |
| Zero offset | Rêzeya sifirê | 5 |
| mg |
|
Guhertoya sifirê (lûtke-to-lûtkê) li ser germahiya tevahî | 5 |
| mg | |
| Dubarebûna destpêk-destpêk | 0.5 |
| mg | |
| Dubarekirina destpêk a roj bi roj | 0.8 |
| mg | |
| Zero Bias Germahiya Coefficient | 0.05 | 0.1 | mg/℃ | |
| Faktora pîvanê | Rastbûna faktora pîvanê | 0.5 |
| % |
| Scale faktora nonlinearity | 0.1 |
| %FS | |
| Leza meşa random |
| 0.029 |
| m/s/√hr |
| Density deng |
| 0.025 |
| mg/√Hz |
| Resolution |
| 1,221×10−8 |
| g/LSB |
| Bandwidth |
| 200 |
| Hz |
| Parametreyên Magnetometer (vebijarkî) | ||||
| Parametre | Şertên testê |
Nirxa tîpîk | Nirxa herî zêde |
Yekbûn |
| Rêjeya pîvana dînamîk |
| 2.5 |
| gauss |
| Zero offset | Jîngeha ne-magnetîk | 15 |
| mgauss |
| Rastiya serî | ||||
| Rastbûna sernavê magnetîkî |
| 0.5 |
| ° |
| Rastbûna helwesta Horizontal | ||||
|
Rastbûna goşeya pitch |
| 0.1 |
| ° |
| Rastbûna goşeya Roll |
| 0.1 |
| ° |
| Parametreyên Gyro | ||||
| Parametre |
Mercên Testê | Nirxa tîpîk |
Nirxa herî zêde | Yekbûn |
| Rêjeya pîvana dînamîk |
|
| 450 | º/s |
| Sifir îstîqrara bias | Varîsansa Allan, teşe Z | 0.8 |
| º/h |
| Guhertoya Allan, X-xebat û Y-tevger | 1.6 |
| º/h | |
| 10s navînî, X, Y ax (-40℃~+80℃, germahiya domdar) | 6 |
| º/h | |
| 1s navîn, X, Y ekse (-40℃~+80℃, germahiya domdar) | 9 |
| º/h | |
| Zero offset | Rêzeya sifirê | ±0.2 |
| º/s |
| Guhertina sifir bias li ser germahiya tevahî | ±0.06 |
| º/s | |
| Dubarebûna destpêk-destpêk | 0.006 |
| º/s | |
| Dubarekirina destpêk a roj bi roj | 0.009 |
| º/s | |
| Bandora Leza Hêzê li ser Zero Bias | 0.002 |
| º/s | |
| Bandora vibrasyonê li ser sifirê, guhertina berî û piştî vibrasyonê | 0.002 |
| º/s | |
| Bandora vibrasyonê li ser sifirê, guherîna berî vibrasyonê | 0.002 |
| º/s | |
| Scale Factor | Rastbûna faktora pîvanê, teşeya Z | 0.3 |
| % |
| Rastiya faktora pîvanê, X, Y eksê | 0.6 |
| % | |
| Scale Factor nonlinearity, Z eksê | 0.01 |
| %FS | |
| Scale Factor nonlinearity, X, Y eksê | 0.02 |
| %FS | |
| Angle rêveçûna random |
| 0.001 |
| °/√hr |
|
Density deng |
| 0.001 |
| °/s/√hr |
| Resolution |
| 3,052×10−7 |
| º/s/LSB |
| Bandwidth |
| 200 |
| Hz |
| Parametreyên Accelerometer | ||||
| Parametre |
Şertên testê |
Nirxa tîpîk | Nirxa herî zêde | Yekbûn |
| Rêjeya pîvana dînamîk |
| 16 |
| g |
| Sifir îstîqrara bias | Allan variance | 0.03 |
| mg |
| Navînî 10s (-40℃~+80℃, germahiya domdar) | 0.2 |
| mg | |
| 1s navîn (-40℃~+80℃, germahiya domdar) | 0..3 |
| mg | |
| Zero offset | Rêzeya sifirê | 5 |
| mg |
|
Guhertoya sifirê (lûtke-to-lûtkê) li ser germahiya tevahî | 5 |
| mg | |
| Dubarebûna destpêk-destpêk | 0.5 |
| mg | |
| Dubarekirina destpêk a roj bi roj | 0.8 |
| mg | |
| Zero Bias Germahiya Coefficient | 0.05 | 0.1 | mg/℃ | |
| Faktora pîvanê | Rastbûna faktora pîvanê | 0.5 |
| % |
| Scale faktora nonlinearity | 0.1 |
| %FS | |
| Leza meşa random |
| 0.029 |
| m/s/√hr |
| Density deng |
| 0.025 |
| mg/√Hz |
| Resolution |
| 1,221×10−8 |
| g/LSB |
| Bandwidth |
| 200 |
| Hz |
| Parametreyên Magnetometer (vebijarkî) | ||||
| Parametre | Şertên testê |
Nirxa tîpîk | Nirxa herî zêde |
Yekbûn |
| Rêjeya pîvana dînamîk |
| 2.5 |
| gauss |
| Zero offset | Jîngeha ne-magnetîk | 15 |
| mgauss |
| Rastiya serî | ||||
| Rastbûna sernavê magnetîkî |
| 0.5 |
| ° |
| Rastbûna helwesta Horizontal | ||||
|
Rastbûna goşeya pitch |
| 0.1 |
| ° |
| Rastbûna goşeya Roll |
| 0.1 |
| ° |


