





Pergala Navîgasyonê ya Yekgirtî




Taybetmendiyên Hilberê
Pergala navîgasyonê ya yekbûyî MS100-B0 xwedan gyroscope û leza MEMS-ê ya performansa bilind e.
Û modula navîgasyonê ya satelîtê, dikare helwest, leza, pozîsyona li derveyî rast-bilind bigihîje
Pîvanî.Bi kapasîteya fusionê ya pir-sensor re, ew dikare bi odometreyên derveyî, lezameter, hwd re were yek kirin.
Dema ku GNSS nederbasdar be, agahdarî tê berhev kirin da ku rastbûna navîgasyonê biparêze.
Taybetmendiyên Hilberê
Rastbûna helwesta -0,1°, rastbûna pozîsyona 2m
- Pêkanîna tevhevkirina senzora alîkar a derveyî
- Rêjeya germahiya xebitandinê: -40℃~+60℃
- Berxwedana şok û vibrasyonê pir bilind
- Ji bo hawîrdorên dijwar dorpêçek mohrkirî IP65
- Têkiliyên dewlemend, RS232, RS422, CAN û navgînên standard ên din piştgirî bikin
- Baweriya bilind
Taybetmendiyên Elektrîkê
- Dabînkirina hêzê: 5V (typ)
- Hêza binavkirî: 3W (herî zêde)
- Ripple: 100mV (pişk-to-lût)
senaryoyên sepanê
Bi berhevkirina nermalava ji bo senaryoyên serîlêdanê yên cihêreng, hilber dikare bi berfirehî di makîneyên çêkirinê de were bikar anîn
Şopandin û pozîsyona aqilmend, ajotina otomatîkî ya pergala bêpîlot, rêveberiya pozîsyona alavên mezin, bazirganî
dronên pîşesaziyê, hwd.
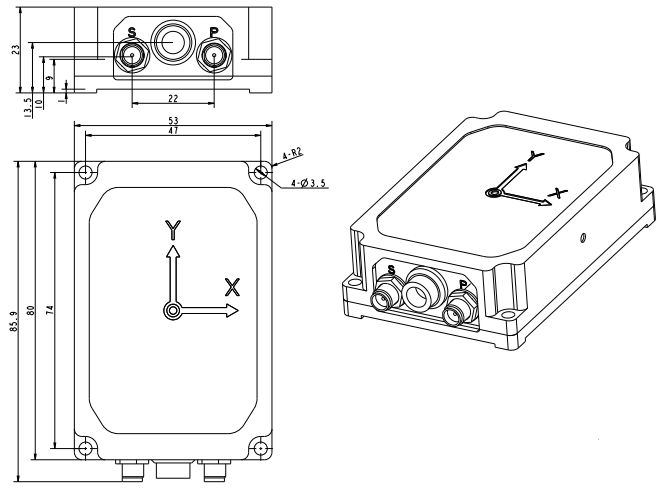
Mezinahiyên Mekanîkî
Nîşaneyên teknîkî
| Taybetmendî | Parametre | Naverok | Bingotin |
| Rastiya serî |
GNSS dualî |
0.1° | 2 m Bingehîn |
| Yek GNSS | 0.2° | Pêdivî ye ku manevra bikin | |
| Post-processing |
0,03° |
| |
| Rastiyê biparêzin | 0,2°/min | têkçûna GNSS | |
| Rastbûna helwestê | GNSS bi bandor | 0.1° | Yek xala L1/L2 |
| Têkiliya Bêhêz / Odometer | 0.1° (RMS) | Bixwe | |
| Post-processing | 0,02° |
| |
| Rastiyê biparêzin | 0,2°/min | têkçûna GNSS | |
| moda VG | 2° | Dema têkçûna GNSS ya bêsînor, bê lezkirin | |
| Rastbûna pozîsyona Horizontal | GNSS bi bandor | 1.2 m | Yek xala L1/L2 |
|
| 2cm+1ppm | RTK | |
| Têkiliya Bêhêz / Odometer | 2‰D (D tê wateya kîlometre, CEP) | Bixwe | |
| post-processing | 1cm+1ppm |
| |
| têkçûna GNSS | 20 m | Têkçûn 60s | |
| Rastbûna leza Horizontal | GNSS bi bandor | 0.1 m/s | Yek xala L1/L2 |
| Têkiliya Bêhêz / Odometer | 0,1 m/s (RMS) | Bixwe | |
| Kombînasyona Inertia/DVL |
0,2 m/s (RMS) |
Bixwe | |
| Gyro | Rêjeya pîvandinê | ±450°/s |
|
| Sifir îstîqrara bias | 2°/h | Allan variance | |
| Accelerometer | Rêjeya pîvandinê | ± 16g | 200 g dikare were xweş kirin |
| Sifir îstîqrara bias | 30 μg | Allan variance | |
| Navbera Ragihandinê
| RS232 | 1 kanal | Bijarî 1 kanal RS422, 1 kanal RS232 |
| RS422 | 1 kanal | An jî 2 kanal RS422, 1 kanal CAN | |
| QÛTÎK | 1 kanal |
| |
| Ketina cûda ya Odometer | 1 kanal | bixwe | |
| Derketina PPS | 1 kanal | bixwe | |
| EVENT input | 1 kanal | bixwe | |
| Taybetmendiyên Elektrîkê | Woltî | 5~36V DC |
|
| Mezaxtina hêzê |
≤3W |
| |
| Ripple | 100 mV | PP | |
|
Taybetmendiyên Structural | Mezinayî | 80 mm × 53 mm × 23 mm |
|
| Pîvan | ≤150g |
| |
|
Jîngehê bikar bînin | Germahiya xebitandinê | -40℃~+60℃ |
|
| Germahiya hilanînê |
-45℃~+65℃ |
| |
|
Vibration |
20~2000Hz,6,06 g |
| |
| Tesîr |
30g,11ms |
| |
| Dersa parastinê | IP65 |
| |
|
Reliability | MTBF | 30000h |
|
| Lifetime | > 15 sal |
| |
| Dema xebatê berdewam |
>24h |
| Taybetmendî | Parametre | Naverok | Bingotin |
| Rastiya serî |
GNSS dualî |
0.1° | 2 m Bingehîn |
| Yek GNSS | 0.2° | Pêdivî ye ku manevra bikin | |
| Post-processing |
0,03° |
| |
| Rastiyê biparêzin | 0,2°/min | têkçûna GNSS | |
| Rastbûna helwestê | GNSS bi bandor | 0.1° | Yek xala L1/L2 |
| Têkiliya Bêhêz / Odometer | 0.1° (RMS) | Bixwe | |
| Post-processing | 0,02° |
| |
| Rastiyê biparêzin | 0,2°/min | têkçûna GNSS | |
| moda VG | 2° | Dema têkçûna GNSS ya bêsînor, bê lezkirin | |
| Rastbûna pozîsyona Horizontal | GNSS bi bandor | 1.2 m | Yek xala L1/L2 |
|
| 2cm+1ppm | RTK | |
| Têkiliya Bêhêz / Odometer | 2‰D (D tê wateya kîlometre, CEP) | Bixwe | |
| post-processing | 1cm+1ppm |
| |
| têkçûna GNSS | 20 m | Têkçûn 60s | |
| Rastbûna leza Horizontal | GNSS bi bandor | 0.1 m/s | Yek xala L1/L2 |
| Têkiliya Bêhêz / Odometer | 0,1 m/s (RMS) | Bixwe | |
| Kombînasyona Inertia/DVL |
0,2 m/s (RMS) |
Bixwe | |
| Gyro | Rêjeya pîvandinê | ±450°/s |
|
| Sifir îstîqrara bias | 2°/h | Allan variance | |
| Accelerometer | Rêjeya pîvandinê | ± 16g | 200 g dikare were xweş kirin |
| Sifir îstîqrara bias | 30 μg | Allan variance | |
| Navbera Ragihandinê
| RS232 | 1 kanal | Bijarî 1 kanal RS422, 1 kanal RS232 |
| RS422 | 1 kanal | An jî 2 kanal RS422, 1 kanal CAN | |
| QÛTÎK | 1 kanal |
| |
| Ketina cûda ya Odometer | 1 kanal | bixwe | |
| Derketina PPS | 1 kanal | bixwe | |
| EVENT input | 1 kanal | bixwe | |
| Taybetmendiyên Elektrîkê | Woltî | 5~36V DC |
|
| Mezaxtina hêzê |
≤3W |
| |
| Ripple | 100 mV | PP | |
|
Taybetmendiyên Structural | Mezinayî | 80 mm × 53 mm × 23 mm |
|
| Pîvan | ≤150g |
| |
|
Jîngehê bikar bînin | Germahiya xebitandinê | -40℃~+60℃ |
|
| Germahiya hilanînê |
-45℃~+65℃ |
| |
|
Vibration |
20~2000Hz, 6.06g |
| |
| Tesîr |
30g, 11ms |
| |
| Dersa parastinê | IP65 |
| |
|
Reliability | MTBF | 30000h |
|
| Lifetime | > 15 sal |
| |
| Dema xebatê berdewam |
>24h |






