


Sîstema Navîgasyonê ya Pêvekirî ya Bêkêr / Satellite Strapdown Fiber Strapdown




Taybetmendiyên Hilberê
Pergala navîgasyonê ya yekbûyî ya fiber optîk FS100 ji gyroskopê fîber-optîka girtî-loop-ê ya rast-bilind, quartz pêk tê.
Lezgînvana maqûl û panela wergirtina GNSS-a-enda bilind, bi tevhevbûn û rêbernameya pir-sensor
Rastkirina algorîtmaya hesabkirina hewayê, peydakirina helwesta navîgasyonê ya pêbawer, lez û pozîsyonê ji cîhana derve re
agahdarî ji bo bicîhanîna pêdiviyên pîvandin û kontrolê yên rast-bilind.
Taybetmendiyên Hilberê
- Rastbûna pola navîgasyonê 0.8nmile/h
- Hilbijartina pir-modê, moda wesayîtê / moda balafirê
- Lihevkirina destpêkê ya statîk 3 hûrdeman / rêzika destpêkê ya bingehîn hejandin 8 hûrdem
- Kontrolkirina xeletiyan
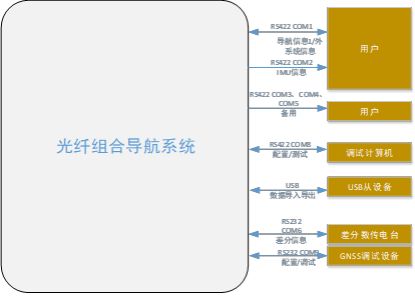
- Têkiliyên dewlemend, RS232, RS422, CAN û navgînên standard ên din piştgirî bikin
- Baweriya bilind
senaryoyên sepanê
-Pergala kolandinê ya biaqil li qada madenê
- Ji bo UAV-yên mezin navîgasyonek bêhêzî ya bingehîn
- kumpasa deryayî
- arastekirina çeka xwebexş
- Position û rêgezkirina wesayîtê
- Pîvana mobîl a rastbûna bilind
- Platforma rast û domdar
Taybetmendiyên Elektrîkê
- Dabînkirina hêzê: 24~36V DC (typ.)
- Hêza binavkirî: 30W (herî zêde)
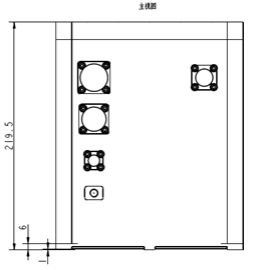
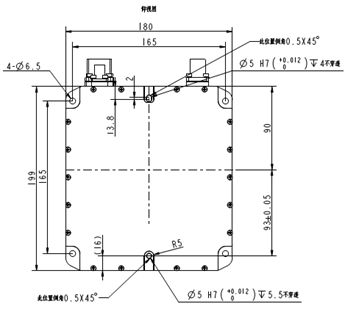
Mezinahiyên Mekanîkî
Nîşaneyên teknîkî
| Taybetmendî | Parametre | Naverok |
| Position hold | Odometer Combo | 0.001D (D kîlometre ye) |
| kombînasyona GNSS | 1.2 m | |
| Bêhêziya paqij | 0.8nmile/h | |
| Rastbûna helwestê | Lihevhatina destpêkê | 0.003° |
| Ragirtina helwestê (GNSS neçalak, bêhêziya paqij) | 0,002°/10min(RMS) | |
| hêza Transient | ≤100W (<3s) | |
|
Rastiya serî | xwe li bakur digere | 0,05°×sec (Latîkî), ku Lati tê wateya firehiyê (RMS) |
| Ragirtina serî (GNSS neçalak, bêhêziya paqij) | 0,003°/10min(RMS) | |
| Rastbûna lezê | Ragirtina lezê (GNSS neçalak, bêhêziya paqij) | 0.3m/s/10min(RMS) |
| Fiber optîk Gyro | Rêjeya pîvandinê | ±400°/s |
| Sifir îstîqrara bias | ≤0,01°/h | |
| Quartz Flexible Accelerometer | Rêjeya pîvandinê | ± 20 g |
| Sifir îstîqrara bias | ≤20 μg (10s navîn) | |
| Navbera Ragihandinê | RS232 | 1 kanal (rêjeya baudê 9,6 kbps ~ 921,6 kbps, standard 115,2 kbps Frequency heta 1000Hz, 200Hz standard) |
|
| RS422 | 6 kanal (Rêjeya Baud 9.6kbps~921.6kbps, default 115.2Kbps Frequency heta 1000Hz, 200Hz standard) |
| Taybetmendiyên Structural | Mezinayî | 199 mm × 180 mm × 219,5 mm (L×W×H) |
| Pîvan | Komek navîgasyonek bêserûber ji 8.0kg ne zêdetir e (ji bo sepanên hewavaniyê vebijarkî ne ji 6.5kg zêdetir e) | |
| Jîngehê bikar bînin
| Germahiya hilanînê | -40℃~65℃ |
| Nemiya nisbî | ≤80% |
Mînaka sepanê
| Taybetmendî | Parametre | Naverok |
| Position hold | Odometer Combo | 0.001D (D kîlometre ye) |
| kombînasyona GNSS | 1.2 m | |
| Bêhêziya paqij | 0.8nmile/h | |
| Rastbûna helwestê | Lihevhatina destpêkê | 0.003° |
| Ragirtina helwestê (GNSS neçalak, bêhêziya paqij) | 0,002°/10min(RMS) | |
| hêza Transient | ≤100W (<3s) | |
|
Rastiya serî | xwe li bakur digere | 0,05°×sec (Latîkî), ku Lati tê wateya firehiyê (RMS) |
| Ragirtina serî (GNSS neçalak, bêhêziya paqij) | 0,003°/10min(RMS) | |
| Rastbûna lezê | Ragirtina lezê (GNSS neçalak, bêhêziya paqij) | 0.3m/s/10min(RMS) |
| Fiber optîk Gyro | Rêjeya pîvandinê | ±400°/s |
| Sifir îstîqrara bias | ≤0,01°/h | |
| Quartz Flexible Accelerometer | Rêjeya pîvandinê | ± 20 g |
| Sifir îstîqrara bias | ≤20 μg (10s navîn) | |
| Navbera Ragihandinê | RS232 | 1 kanal (rêjeya baudê 9,6 kbps ~ 921,6 kbps, standard 115,2 kbps Frequency heta 1000Hz, 200Hz standard) |
|
| RS422 | 6 kanal (Rêjeya Baud 9.6kbps~921.6kbps, default 115.2Kbps Frequency heta 1000Hz, 200Hz standard) |
| Taybetmendiyên Structural | Mezinayî | 199 mm × 180 mm × 219,5 mm (L×W×H) |
| Pîvan | Komek navîgasyonek bêserûber ji 8.0kg ne zêdetir e (ji bo sepanên hewavaniyê vebijarkî ne ji 6.5kg zêdetir e) | |
| Jîngehê bikar bînin
| Germahiya hilanînê | -40℃~65℃ |
| Nemiya nisbî | ≤80% |






